Tensorflow Architecture: Parallism
Table of Contents
1. Tensorflow Architecture: Parallism
1.1. Overview
从代码上看, tensorflow 主要包括:
- core
- grappler
- distributed runtime
- runtime executor
- kernels
- stream executor
- compiler
- mlir
- XLA
- 3rd party
- eigen
- mkl
- absl
- …
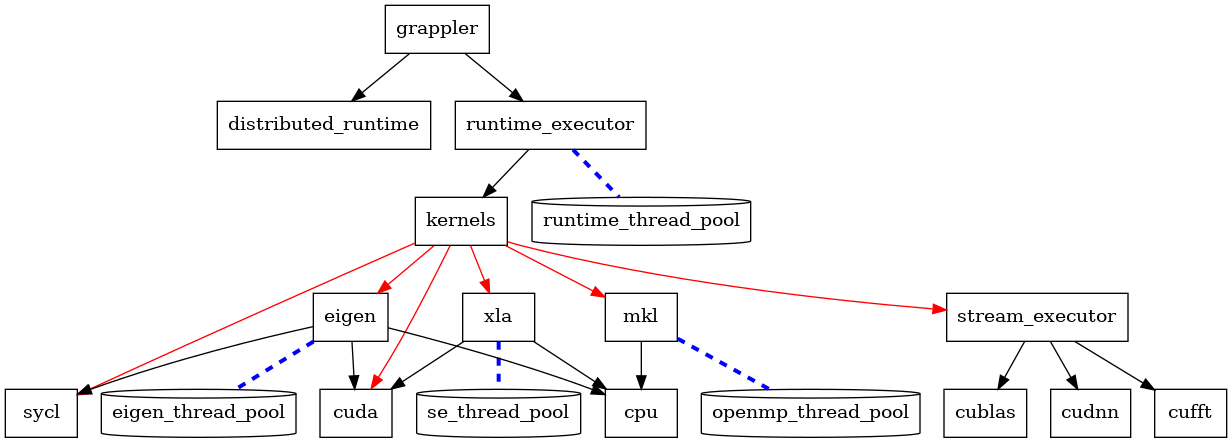
功能上大致的层次是:
digraph {
node [shape="box"];
grappler -> distributed_runtime
grappler -> runtime_executor
runtime_executor -> kernels
runtime_thread_pool [shape="cylinder"]
runtime_executor -> runtime_thread_pool [style="dashed",arrowhead=none,penwidth=3,color="blue"]
kernels-> xla [color="red"]
kernels->mkl [color="red"]
kernels->eigen [color="red"]
kernels->sycl [color="red"]
kernels->cuda [color="red"]
kernels->stream_executor [color="red"]
eigen->cpu
eigen->cuda
eigen->sycl
eigen_thread_pool [shape="cylinder"]
eigen->eigen_thread_pool [style="dashed",arrowhead=none,penwidth=3,color="blue"]
stream_executor->cublas
stream_executor->cudnn
stream_executor->cufft
xla->cpu
xla->cuda
se_thread_pool [shape="cylinder"]
xla->se_thread_pool [style="dashed",arrowhead=none,penwidth=3,color="blue"]
mkl->cpu
openmp_thread_pool [shape="cylinder"]
mkl->openmp_thread_pool [style="dashed",arrowhead=none,penwidth=3,color="blue"]
}
1.3. distributed runtime
1.4. kernels
默认情况下 tensorflow 使用预先手写的 kernel.
1.4.1. eigen
默认情况下 tensorflow 使用 eigen, eigen 是一个基于 c++ 模板的线性代数库, 和 BLAS (Basic Linear Algebra Subprograms) 功能类似. 它支持的特性包括:
在 tensorflow 里 eigen 会用到以下几个特性:
- 在 cpu 直接执行 (使用 thread pool, 不使用 openmp)
- 用 cuda 执行
- 使用 mkl_dnn 实现其 contract kernel
- 使用 sycl
1.4.2. mkl
当配置了 `–config=mkl` 时, 会使用 mkl 实现一些算子, 而不使用 eigen.
mkl 会使用 openmp 通过 thread 和 simd 来加速.
mkl 的支持与 cuda 和 sycl 不太一样: 它会提前用一个 MklToTfConversionPass 把它支持的 op 修改成自己的名字, 例如 _MklSoftmax
1.4.2.1. MklSoftmaxOp
#ifdef INTEL_MKL template <typename Device, typename T> class MklSoftmaxOp : public OpKernel { public: ~MklSoftmaxOp() {} explicit MklSoftmaxOp(OpKernelConstruction* context) : OpKernel(context) {} void Compute(OpKernelContext* context) override try { // ... // NOTE: softmax_fwd 是 mkldnn::softmax_forward softmax_fwd->Execute(src_data, dst_data); } }; #endif
1.4.3. cuda
当配置了 `–config=cuda` 时, 会使用 cuda 实现一些算子:
1.4.3.1. SoftmaxOpGPU
softmax 的 gpu 实现是直接用 cuda 实现的
首先定义 cuda 这个 config
build:using_cuda --define=using_cuda=true build:using_cuda --action_env TF_NEED_CUDA=1 build:using_cuda --crosstool_top=@local_config_cuda//crosstool:toolchain build:cuda --config=using_cuda build:cuda --define=using_cuda_nvcc=true
using_cuda_nvcc 会导致 GOOGLE_CUDA 宏被定义
def if_cuda(if_true, if_false = []): return select({ "@local_config_cuda//cuda:using_nvcc": if_true, "@local_config_cuda//cuda:using_clang": if_true, "//conditions:default": if_false, }) if_cuda(["-DGOOGLE_CUDA=1"])GOOGLE_CUDA 宏导致 softmax_op_gpu.cu.cc 被编译, 相关 kernel 被注册
#if GOOGLE_CUDA || TENSORFLOW_USE_ROCM template <typename T> class SoftmaxOpGPU : public OpKernel { void Compute(OpKernelContext* context) override { GpuLaunchKernel( GenerateNormalizedProb<T, acc_type>, numBlocks, numThreadsPerBlock, 0, cu_stream,...); } }; template <typename T, typename U> __global__ void GenerateNormalizedProb(...) { const int tid = blockIdx.x * blockDim.x + threadIdx.x; // ... } REGISTER_KERNEL_BUILDER( Name("Softmax").Device(DEVICE_GPU).TypeConstraint<float>("T"), SoftmaxOpGPU<float>); #endif
1.4.3.2. ArgMaxOp
argmax 的 gpu 实现是通过 eigen 的 cuda 实现的
#if defined(GOOGLE_CUDA) // NOTE: EIGEN_USE_GPU 会 #define EIGEN_USE_GPU REGISTER_KERNEL_BUILDER( Name("ArgMax") .Device(DEVICE_GPU) .TypeConstraint<type>("T") .HostMemory("dimension"), ArgMaxOp<GPUDevice, type, int64>); #endif // NOTE: ArgMaxOp 是 CPU/GPU 通用的, 不需要包在 GOOGLE_CUDA 宏中 template <typename Device, typename T, typename Tout> class ArgMaxOp : public ArgOp<Device, T, Tout, functor::ArgMax<Device, T, Tout> > { public: explicit ArgMaxOp(OpKernelConstruction* context) : ArgOp<Device, T, Tout, functor::ArgMax<Device, T, Tout> >(context) {} }; template <typename Device, typename T, typename Tout, typename ArgFunctor> class ArgOp : public OpKernel { public: explicit ArgOp(OpKernelConstruction* context) : OpKernel(context) {} void Compute(OpKernelContext* context) override { // ... #define HANDLE_DIM(NDIM) \ case NDIM: \ // NOTE: 最终会调用 ArgFunctor::Reduce1 等, 例如 ArgMax::Reduce1 \ ArgFunctor::Reduce##NDIM( \ context->eigen_device<Device>(), input.tensor<T, NDIM>(), axis, \ output->tensor<Tout, NDIM - 1>()); \ break; switch (input_dims) { HANDLE_DIM(1); HANDLE_DIM(2); // ... } } #undef HANDLE_DIM }; template <typename Device, typename T, typename Tout> struct ArgMax { #define DECLARE_COMPUTE_SPEC(Dims) \ EIGEN_ALWAYS_INLINE static void Reduce##Dims( \ const Device& d, typename TTypes<T, Dims>::ConstTensor input, \ const int32 dimension, \ typename TTypes<Tout, Dims - 1>::Tensor output) { \ output.device(d) = input.argmax(dimension).template cast<Tout>(); } DECLARE_COMPUTE_SPEC(1); DECLARE_COMPUTE_SPEC(2); #undef DECLARE_COMPUTE_SPEC } ; // NOTE: input 是 Eigen::TensorMap, 这里会调用 engien 的 argmax 方法, // 最终会调用到 TensorReductionGpu.h 中相应的 kernel 例如 FullReductionKernel
1.4.3.3. MatMulOp
matmul 的 gpu 实现是通过 stream executor 实现的
#if GOOGLE_CUDA REGISTER_KERNEL_BUILDER( Name("MatMul").Device(DEVICE_GPU).TypeConstraint<T>("T"), MatMulOp<GPUDevice, T, true /* cublas, true by default */>); #endif // -------------------- template <typename Device, typename T, bool USE_CUBLAS> class MatMulOp : public OpKernel { public: void Compute(OpKernelContext* ctx) override { // ... LaunchMatMul<Device, float, USE_CUBLAS>::launch( ctx, a_float, b_float, dim_pair, &algorithms_, use_autotune_, &out_float); // ... } }; // -------------------- #if GOOGLE_CUDA template <typename T> struct LaunchMatMul<GPUDevice, T, true /* USE_CUBLAS */> { static void launch() { // ... auto* stream = ctx->op_device_context()->stream(); // ... bool blas_launch_status = stream ->ThenBlasGemm( blas_transpose_b, blas_transpose_a, n, m, k, 1.0f, b_ptr, transpose_b ? k : n, a_ptr, transpose_a ? m : k, 0.0f, &c_ptr, n) .ok(); // ... } // NOTE: ThenBlasGemm 是 stream_executor 的接口 #endif
1.4.4. sycl
当配置了 `–config=sycl` 时, 会使用 sycl 实现一些算子.
sycl 的支持与 GPU 的支持类似 (除了 stream executor) 的方式:
- 有些是用 sycl 直接实现
- 有些是通过 eigen 实现
1.4.4.1. SoftmaxOp
softmax 的 sycl 支持是通过 eigen 实现的
template <typename Device, typename T> class SoftmaxOp : public OpKernel { public: explicit SoftmaxOp(OpKernelConstruction* context) : OpKernel(context) { log_ = absl::StartsWith(type_string(), "Log"); } void Compute(OpKernelContext* context) override { // ... if (logits_in.NumElements() > 0) { // NOTE: 这里的 functor 会最终调用到 SoftmaxEigenImpl<SyclDevice> functor::SoftmaxFunctor<Device, T> functor; functor( context->eigen_device<Device>(), logits_in.flat_inner_dims<T>(), softmax_out->flat_inner_dims<T>(), log_); } } }; // -------------------- template <typename Device, typename T> struct SoftmaxEigenImpl { static void Compute( const Device& d, typename TTypes<T>::ConstMatrix logits, typename TTypes<T>::Matrix softmax, const bool log) { // ... // logits 是 Eigen TensorMap auto shifted_logits = (logits - logits.maximum(along_class) .eval() .reshape(batch_by_one) .broadcast(one_by_class)); // ... } }; // -------------------- // NOTE: 注册 REGISTER_KERNEL_BUILDER( Name("Softmax").Device(DEVICE_SYCL).TypeConstraint<float>("T"), SoftmaxOp<SYCLDevice, float>);
1.4.4.2. Pooling3DOp
Pooling3DOp 是直接用 sycl 实现的
template <typename T> struct LaunchAvgPooling3dGradOp<SYCLDevice, T> { static void launch(...) { // ... device.sycl_queue().submit([&](cl::sycl::handler& cgh) { auto input_backprop_access = input_backprop_buffer .template get_access<cl::sycl::access::mode::read>(cgh); auto output_backprop_access = output_backprop_buffer .template get_access<cl::sycl::access::mode::write>(cgh); AvgPool3DGradSYCL<T> functor( depth, batch, in_planes, in_rows, in_cols, output_shape, window, stride, padding, input_backprop_access, output_backprop_access); cgh.parallel_for(cl::sycl::range<1>(num_threads), functor); }); } }; // -------------------- #ifdef TENSORFLOW_USE_SYCL REGISTER_KERNEL_BUILDER( Name("AvgPool3DGrad") .Device(DEVICE_SYCL) .TypeConstraint<T>("T") .HostMemory("orig_input_shape"), AvgPooling3dGradOp<SYCLDevice, T>); #endif // TENSORFLOW_USE_SYCL
1.4.5. stream executor
启用 cuda 后使用 cublas 和 cudnn 的 op 需要用 stream executor 来执行, 例如:
- matmul_op
- conv_ops
- where_op
- fused_batch_norm_op
- pooling_ops
stream executor 定义了几个功能集合, 例如:
- BlasSupport
- DnnSupport
- RngSupport
- FftSupport
cuda 和 rocm 均有对应的具体实现, 例如 BlasSupport 中的 DoBlasAsum, DoBlasDot, … 以及 DnnSupport 中的 DoMatmul, DoConvolve, …
1.4.6. XLA
XLA (Accelerated Linear Algebra) 是一个针对 graph 的 jit (just in time) 编译器.
当 tensorflow 指定了 jit_compile 选项时, 则不再使用前面手写的 kernel (gemm 和 conv 除外), 而是使用 XLA 编译生成的 kernel.
实际上使用 XLA 还有一个主要用途是开发新后端
XLA 编译的步骤大约是:
- 把图翻译成 HLO IR1, 新版本的 tensorflow 会先翻译成 MLIR (Multi-Level IR) 再翻译成 HLO
- 对 HLO 进行优化
- XLA 后端 (cpu, gpu) 把 HLO 转换为 LLIR
- llvm 对 LLIR 进行优化
- 使用 llvm 后端生成 cpu 代码或 nvptx
- nvptx (以及 cpu 代码) 通过 stream_executor 执行
1.4.6.1. tf2xla
XLA 并不能凭空生成 kernel, 它需要 tf2xla 告诉它 op 要怎么计算 (以 IR 的形式), 例如:
class SoftmaxOp : public XlaOpKernel { public: explicit SoftmaxOp(OpKernelConstruction* ctx) : XlaOpKernel(ctx) { log_ = absl::StartsWith(type_string(), "Log"); } void Compile(XlaOpKernelContext* ctx) override { // ... xla::XlaBuilder* const b = ctx->builder(); const xla::XlaComputation& max_func = *ctx->GetOrCreateMax(type); auto logits_max = xla::Reduce( logits, xla::MinValue(b, xla_type), max_func, {kClassDim}); auto shifted_logits = xla::Sub(logits, logits_max, batch_dims); auto exp_shifted = xla::Exp(shifted_logits); // ... auto reduce = xla::Reduce( converted, xla::Zero(b, xla_accumulation_type), *ctx->GetOrCreateAdd(accumulation_type), {kClassDim}); auto sum = XlaHelpers::ConvertElementType(reduce, type); // NOTE: softmax=exp/sum, sum 又来自 reduce (..., add) auto softmax = log_ ? xla::Sub(shifted_logits, xla::Log(sum), batch_dims) : xla::Div(exp_shifted, sum, batch_dims); ctx->SetOutput(0, softmax); } }
1.4.6.2. HloModulePass
针对 HLO 的优化, 例如:
- hlo_cse (common subexpression elimination)
- hlo_dce (dead code elimination)
- hlo_constant_folding
- horizontal_fusion
- instruction_fusion
例如 cse 指的是这种优化:
优化前: x=a+b+c y=a+b+d 优化后: z=a+b x=z+c y=z+d 其中 a+b 称为 common subexpression
1.4.6.3. CpuCompiler/GpuCompiler
- backend 通过 `RunHloPasses` 针对 HLO 做优化
- `RunBackend` 先将 HLO 转换成 LLVM
- `LinkAndOptimizeModule` 对 LLVM 做优化
- `CompileTargetBinary` 把 llvm 转换成 ptx (Parallel Thread eXecution)
- GpuExecutable 通过 stream_executor 执行 ptx
1.5. Parallelism
parallelism 主要涉及到几个方面:
- dataset (及其预处理) 的并行, 主要是 dataset 的 num_parallel_calls 以及 prefetch 功能
- inter_op_parallelism_threads
- intra_op_parallelism_threads
- OMP_NUM_THREADS
使用 TF Profiler 可以分析 cpu 和 data 的并行情况.
1.5.1. data parallelism
https://www.tensorflow.org/guide/data_performance
dataset 的处理分为两步:
- 数据加载
- 数据增强和预处理
前者是 io bound, 并行会有效果, 但受限于数据传输速度; 后者是 cpu bound, 可以更好的利用并行.
tensorflow dataset api 用 prefetch, interleave, map 并行, 用 tf profiler 分析并行效果.
1.5.1.1. generator
tensorflow dataset api 是一个 generator 模式的 api, 用来构造 data pipeline, 例如:
dataset(generator) .map(fn1,num_parallel_calls) .filter(fn2) .shuffle() .prefetch(buffer_size);
上面的例子中, generator 负责加载数据, 后面的 map, filter 等负责数据增强和预处理.
generator 模式适合并行: cuda/sycl/opencl/openmp 等并行架构实际上与 generator 的 map 类似: 把 `kernel` map 到某个序列上产生另一个序列. generator 本身与 coroutine 和 functional programming 有很大的关系
1.5.1.2. prefetch
prefetch 相当于一种 software pipelining.
单个 dataset (generator) 是底层数据文件的抽象, 无法并行使用, 但是可以 prefetch. 例如这样:
no prefetch:
generator.next() generator.next()
---------------- ----------------
map map
--------- ---------
train train
-------------- --------------
prefetch:
generator.next() generator.next()
---------------- ----------------
map map
--------- ---------
train train
-------------- --------------
在上图中, 因为梯度更新的原因, train 需要顺序执行, 但 generator 和 map 可以按需要通过多线程并行.
1.5.1.3. interleave
interleave 是一种 IO parallelization.
如果 prefetch 不够, 可以用 interleave, interleave 通过 num_parallel_calls 参数可以并行的加载 多个 dataset, 例如这样:
interleave:
generator.next()
------------
map
-------
generator2.next()
----------
map
-------
train
--------------
1.5.1.4. map
map 是 processing parallelization.
map 也提供了 num_parallel_calls 可以并行的 map, 例如这样
generator.next()
----------------
map
--------
map
------
train
--------------
1.5.1.5. 其它
- 由于 dataset 容易成为训练时的瓶颈, 所以 nvidia 专门有一个 DALI 库用来加速 dataset 的处理
- dataset 通过 num_parallel_calls 指定它自己的 thread pool, 有一个 AUTOTUNE 机制可以自动调整 thread pool 以达到最佳性能
1.5.2. inter_op_parallelism_threads
指相互独立的 op 可以并行的计算, 例如:
x=a+b y=c+d z=x+y
`a+b` 和 `c+d` 可以并行计算.
用 inter_op_parallelism_threads 可以限定 runtime thread pool 的大小, 例如 DirectSession 的 thread_pools_ 和 grpc_server 的 compute_pool
1.5.3. intra_op_parallelism_threads
eigen 的 TensorDeviceThreadPool 支持对单个 op 并行计算, tensorflow 通过 intra_op_parallelism_threads 设置 eigen thread pool 的大小
1.5.4. OMP_NUM_THREADS
mkl 算子的并行是通过 openmp 实现, OMP_NUM_THREADS 可以控制 openmp thread poll 的大小. OMP_NUM_THREADS 之于 mkl 相当于 intra_op_parallelism_threads 之于 eigen.
1.5.5. 测试
https://github.com/sunwayforever/tf_cpu_benchmark
通过测试一个简单的 mnist 模型, 有以下结论:
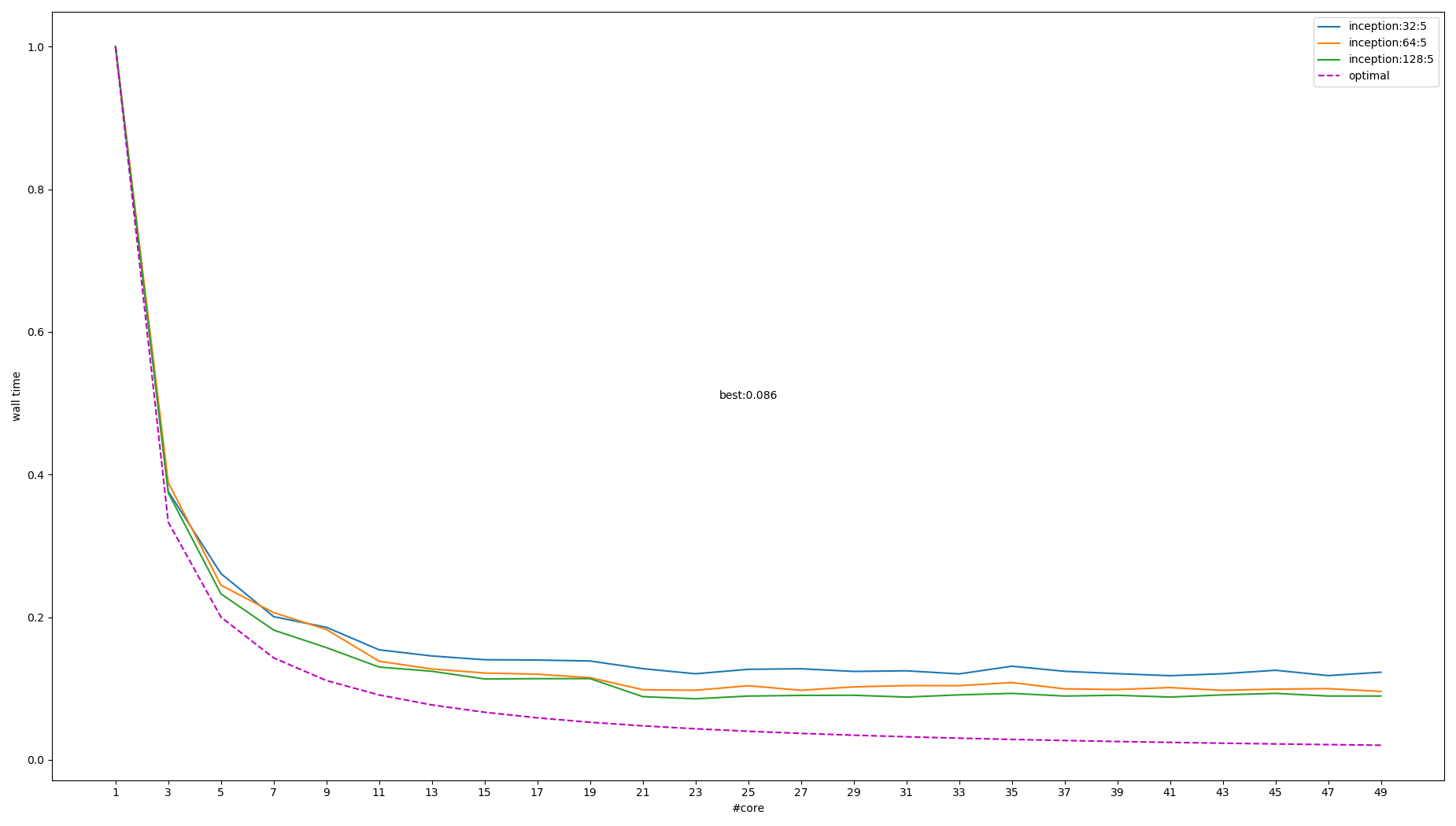
- inter_op_parallelism_threads 作用不大, 可能是因为 mnist 模型没有分支结构, 换成 Inception 会明显起作用
- intra_op_parallelism_threads 对 eigen 作用很大, OMP_NUM_THREADS 对 eigen 没有作用
- OMP_NUM_THREADS 对 mkl 作用很大, intra_op_parallelism_threads 的作用不明显
- 设定各个 pool 的大小时需要考虑 core 的个数以避免 thread oversubscription, 例如当 `inter_op_parallelism_threads * OMP_NUM_THREADS 超过 core` 时 mkl 性能会下降很多.
有一篇文章试验了这几个参数的选择, 它也传递了一个信息: 参数并非越大越好, 且参数调整到最佳后性能也和模型有很大关系, 且整体改进不大.
1.5.5.1. intra_op_parallelism 性能
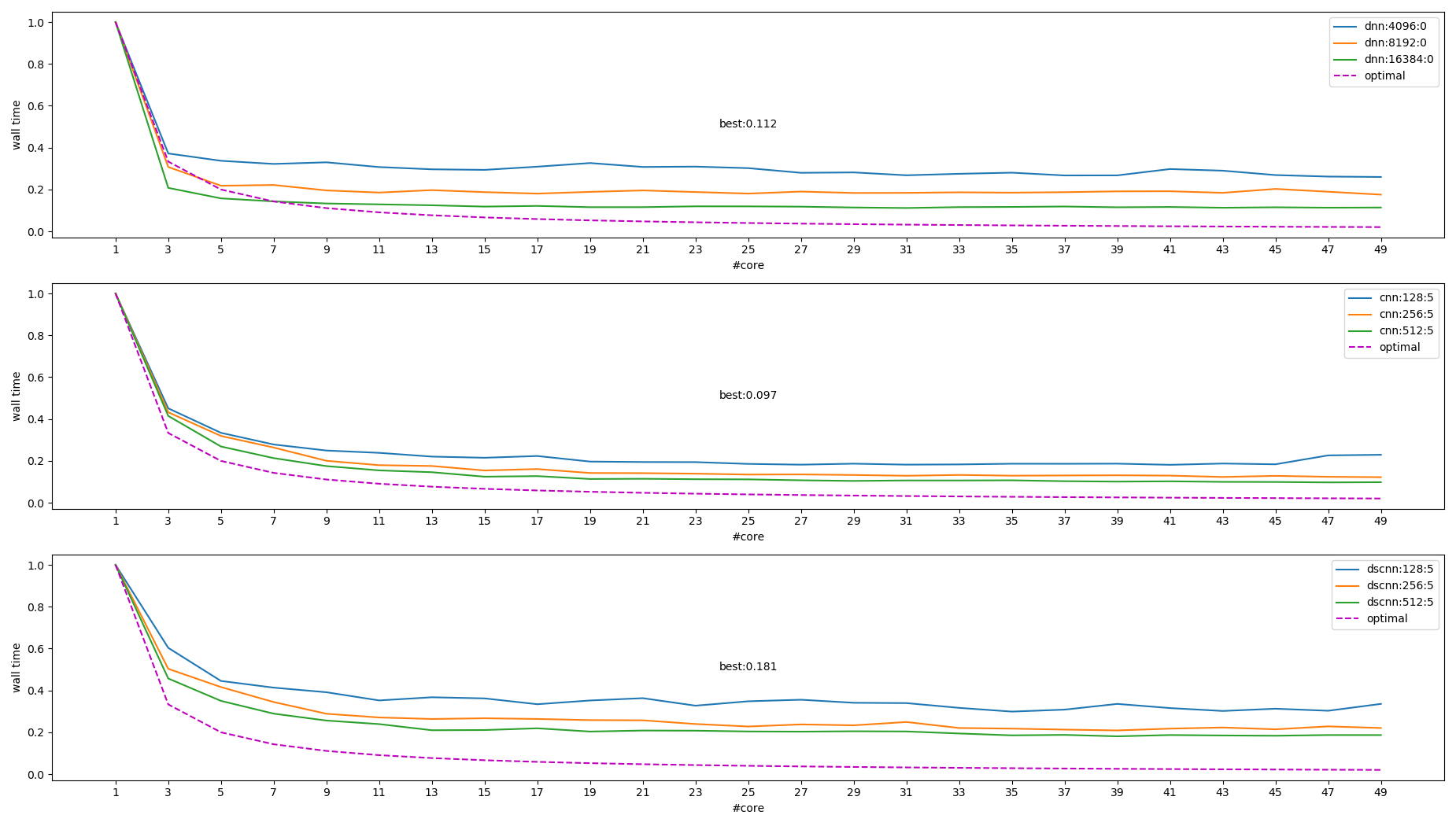
线程数不超过 core 的个数时, 更多的线程有更好的性能, 但随着线程数的增加提升越来越小, 例如:
测试 PC 有两颗 xeon 4210, 各 10 核 20 线程
eigen 测试的结果:
mkl 测试结果:
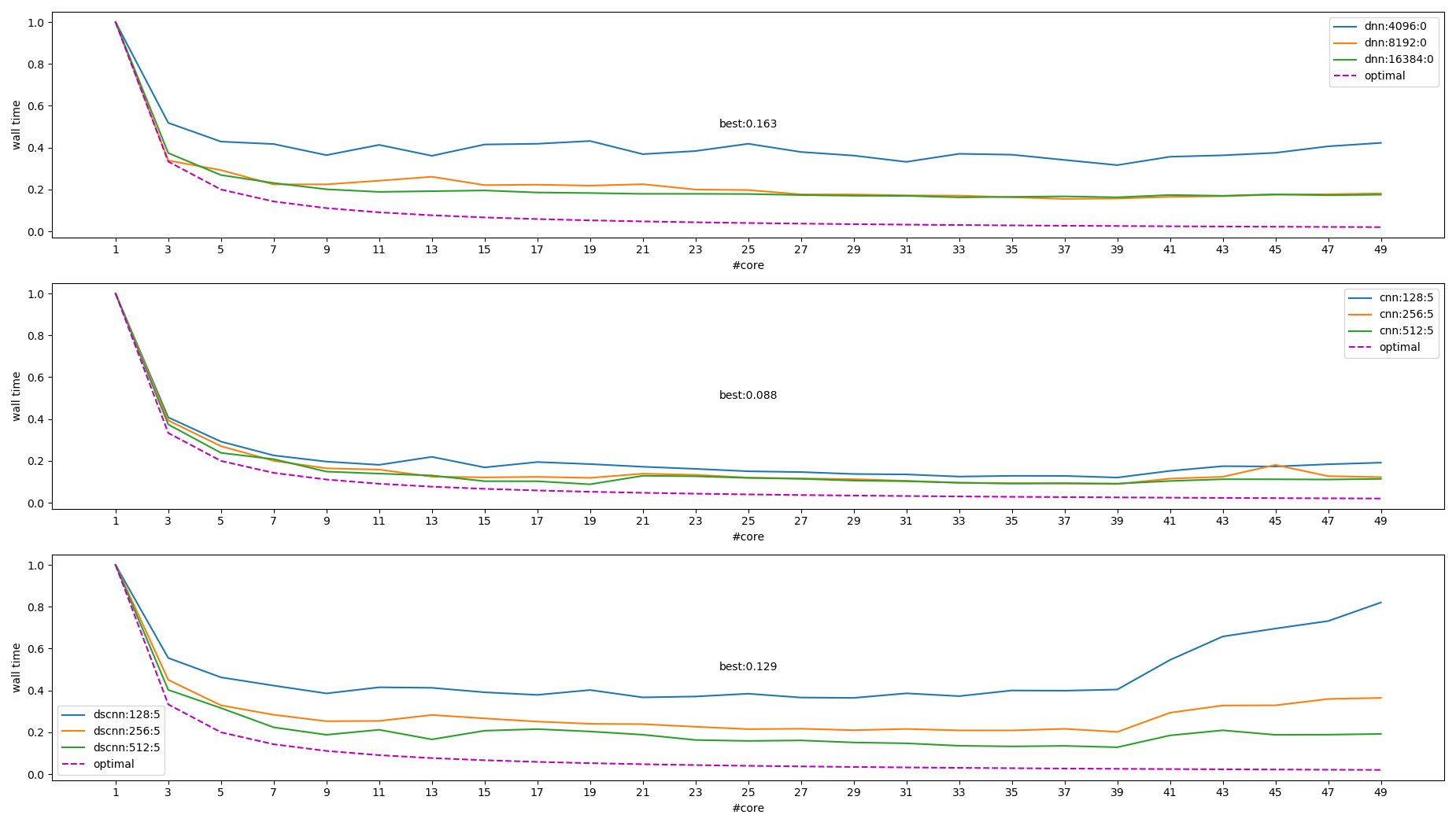
图中右上角的图例表示不同模型和大小, 其中 `optimal` 这条线是 \(f(x)=\frac{1}{x}\), 做为参考值
从上图能得出结论:
- 模型越大提升越多
- 线程越多, 提升空间越小
- 超过 core 个数时性能会变差
- 最大提升了 ~10 倍, 理论上最好性能应该是 20~40 倍
下图是统计 cpu time 的情况. 所谓 cpu time, 是指统计进程使用的所有 core 处于 TASK_RUNNING 状态的时间之和, 这个时间一般会远大于 wall time.
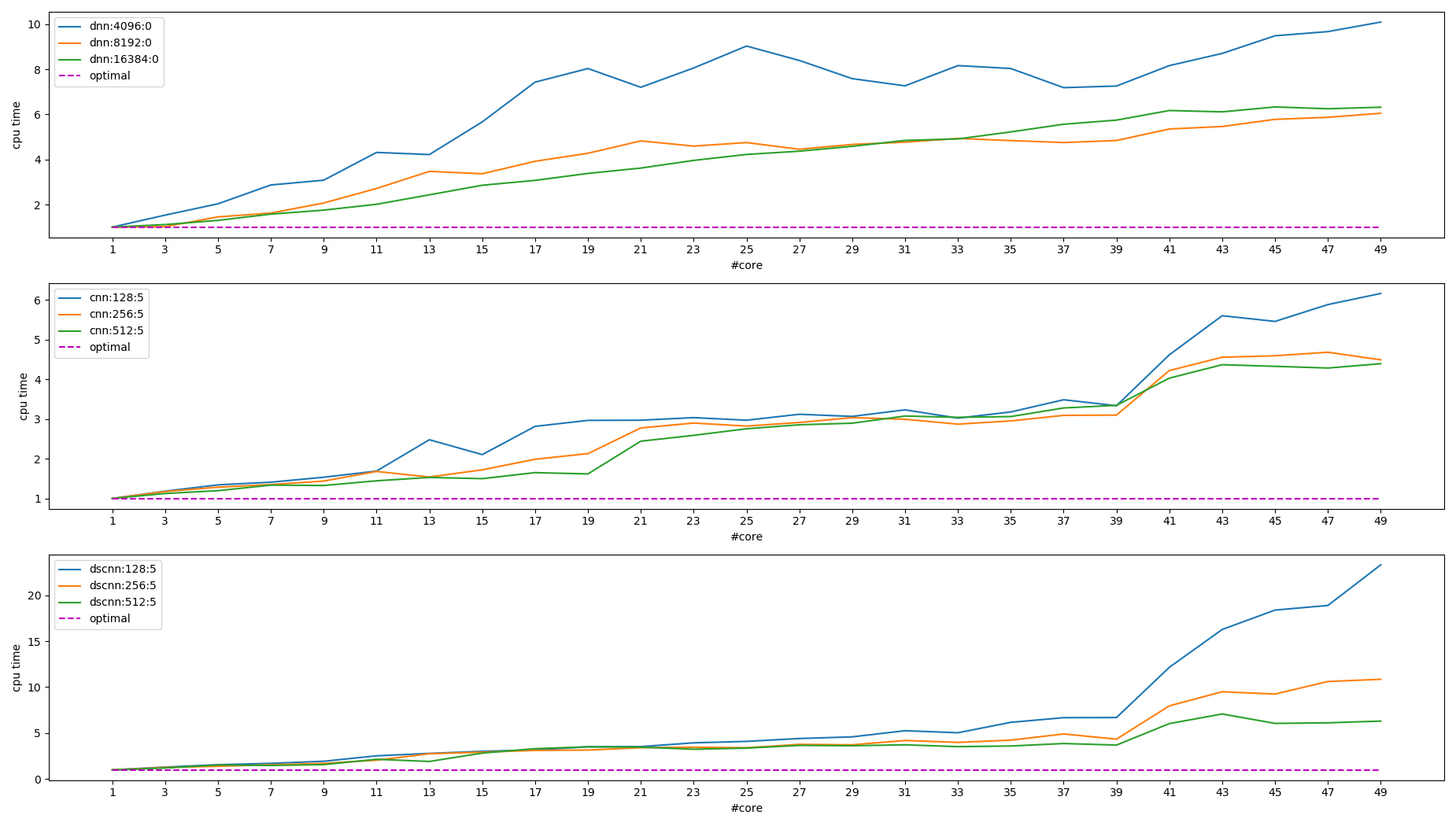
可见 intra_op_parallelism 性能没有达到预期, 可能的原因是:
- 阿姆达尔定律(Amdahl's Law)
- intra_op_parallelism 属于 find-graind parallelism, 相对于 corse-grained palrallelism (例如 make -j 这种),它有许多通信和同步的开销 (cache, 锁, 原子操作, 内存屏障等),对于这类问题, 使用向量指令会更有优势 (Optimizing software in C++ By Agner Fog, p108, Multithreading). 另外, 更多的线程意味着更多的内存占用 (栈, 中间结果…), 影响 cache 从而影响性能.
1.5.5.2. inter_op_parallelism 性能
前面提到 inter_op_parallelism_threads 对 mnist 影响不大, 通过构造一个并行的网络, 可以观察 inter_op_parallelism_threads 的影响.
网络大致是这样的:
+-> conv -+ +-> conv -+
|-> conv -| |-> conv -|
|-> conv -| |-> conv -|
input -> |-> conv -+-> concat ->|-> conv -+-> flattern -> dense -> output
|-> conv -| |-> conv -|
. . . .
. . . .
+-> conv -+ +-> conv -+
mkl 执行的结果为:
可见 inter_op_parallelism 有效, 但仍然受到同样的某种限制, 无法达到最佳预期.
1.5.5.3. 基于 vtune 的初步分析
1.5.5.3.1. 同步的影响
对比 2/4/12 个线程的 threading 数据:
2x:

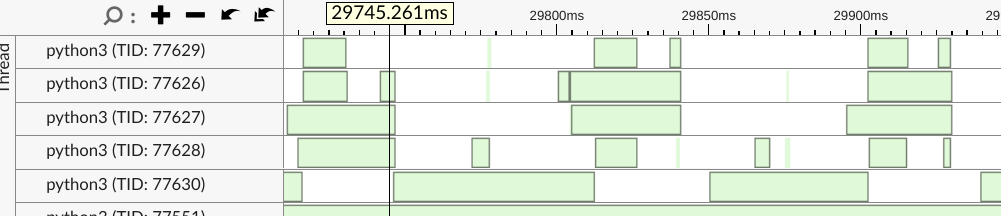
4x:
12x:
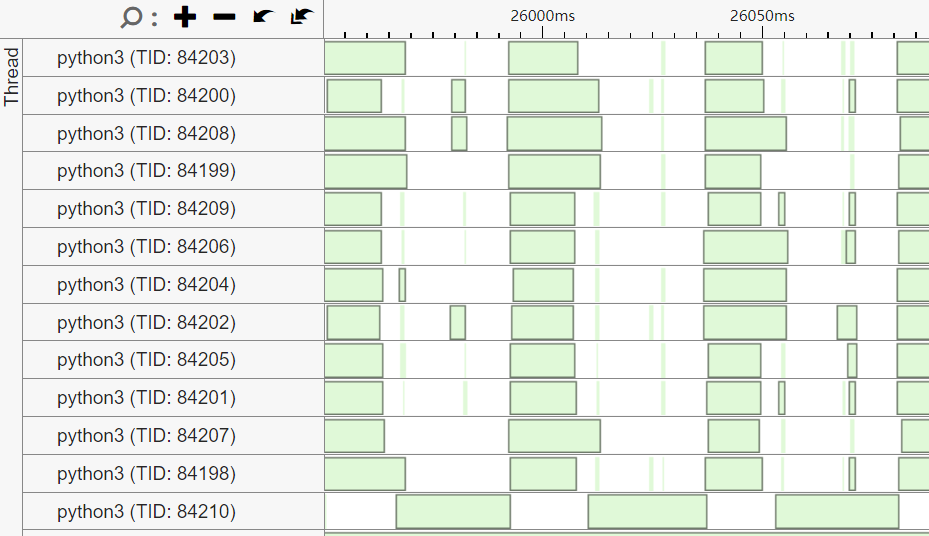
可以看到随着线程增加, eigen 的一个负责 barrier 的线程(图片中最底下那个线程)的处理时间基本不变 (~15ms)
以 4x 为例, 绿色表示 wait, 其中 77630 使用的 cond 是一个 barrier, 前四个 worker thread 是生产者, barrier 是消费者. barrier 消费完数据后通知 worker thread 继续工作. barrier 负责把 worker thread 的结果进行某种 reduction 的工作是不变的, 相当于 Amdahl's Law 中不能并行那部分.
Update on 2022/10/31
TensorContractionThreadPool 的 evalProductImpl 有下面的注释, 是一个潜在的问题, 但是和前面碰到的问题并是同一个问题:
// We compute partial gemm results in parallel, and to get the final result // we need to add them all together. For the large number of threads (>= 48) // this adds a very expensive sequential step at the end. // ... // For now we use just a single level of ranges to compute pre-aggregated // partial sums, but in general we can use more layers to compute tree // aggregation in parallel and reduce the size of the sequential step. // // TODO(ezhulenev): Add multilevel tree aggregation? Probably will make // sense only if number of threads >= ~128?
前面的问题实际是并行 contraction 后紧接的一个单线程的 Col2im 导致的 (tensorflow/core/kernels/conv_grad_input_ops.cc::Compute), 去掉这个 col2im 后 wall time 从 0.106 变为 0.085 (即加速比从 9.4 变为 11.8)
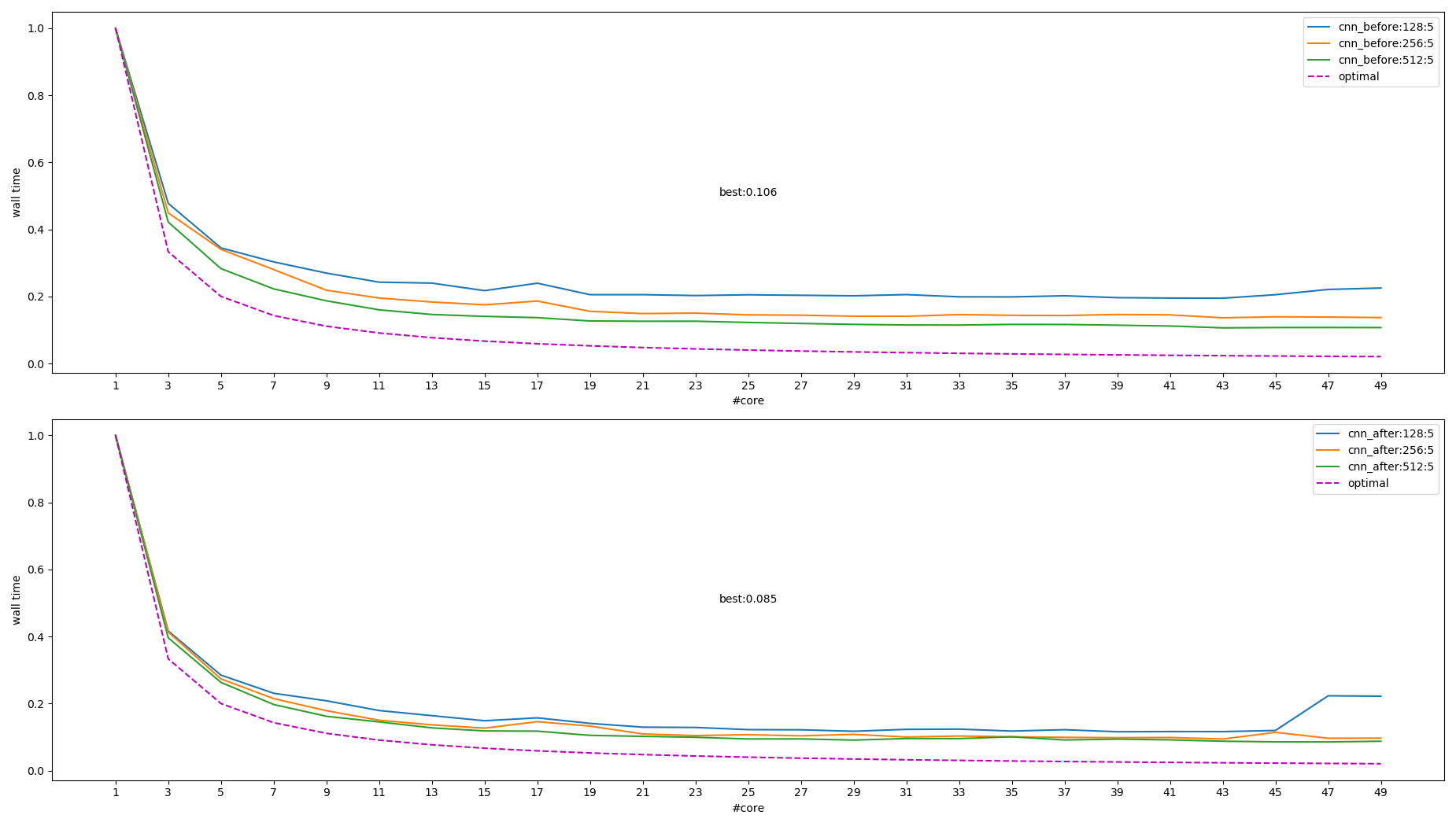
上图也能解释为什么模型越大并行的性能越好: 因为模型越大, 串行部分占比越小.
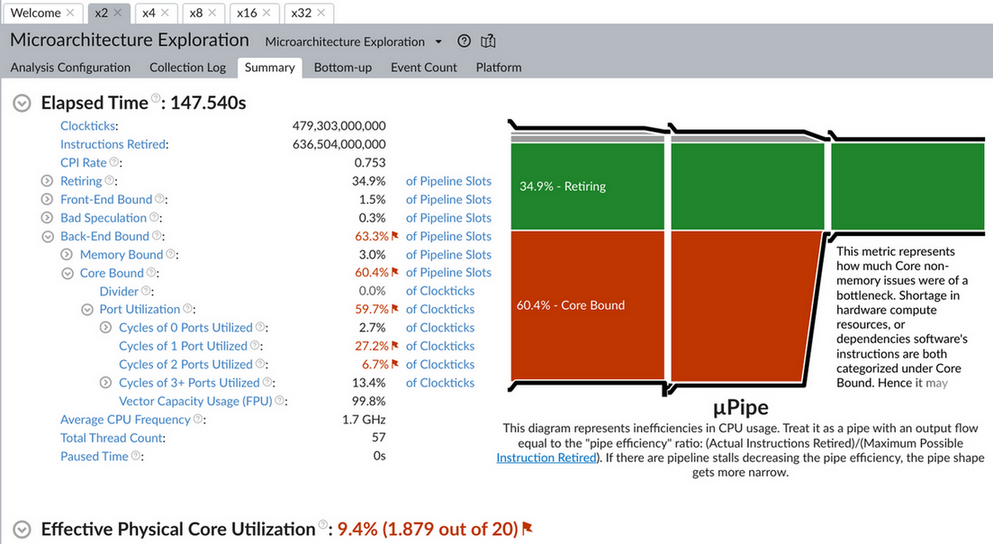
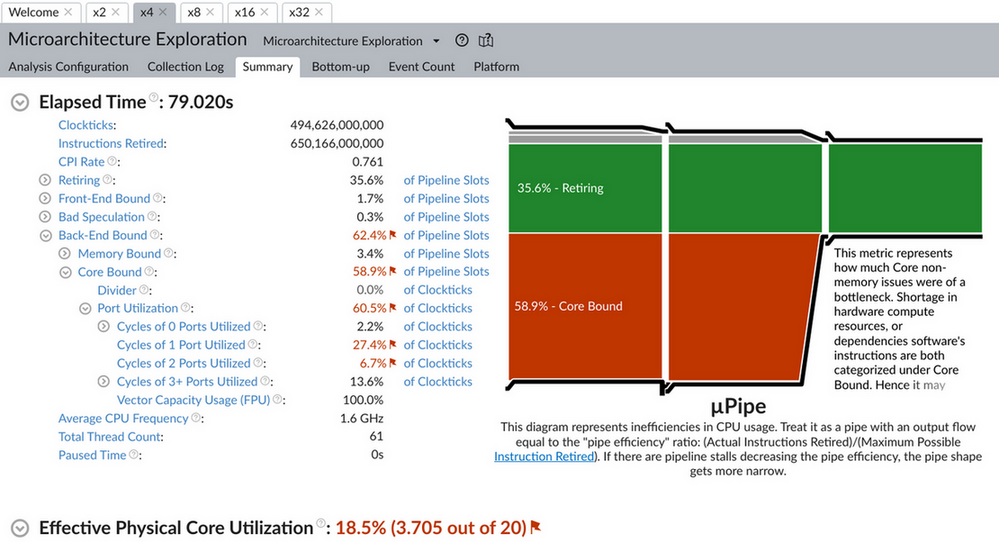
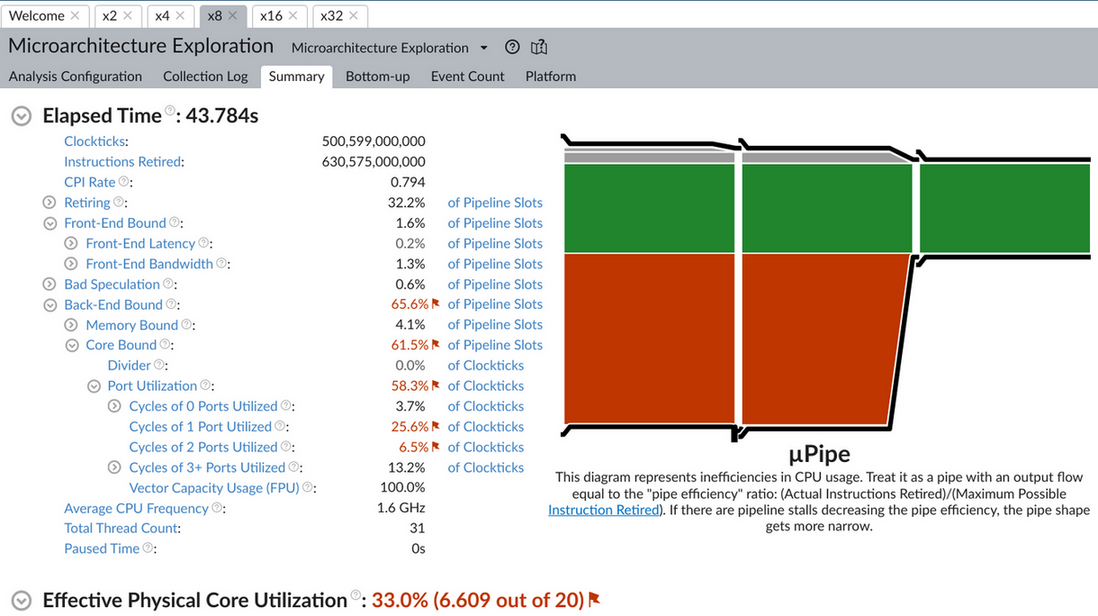
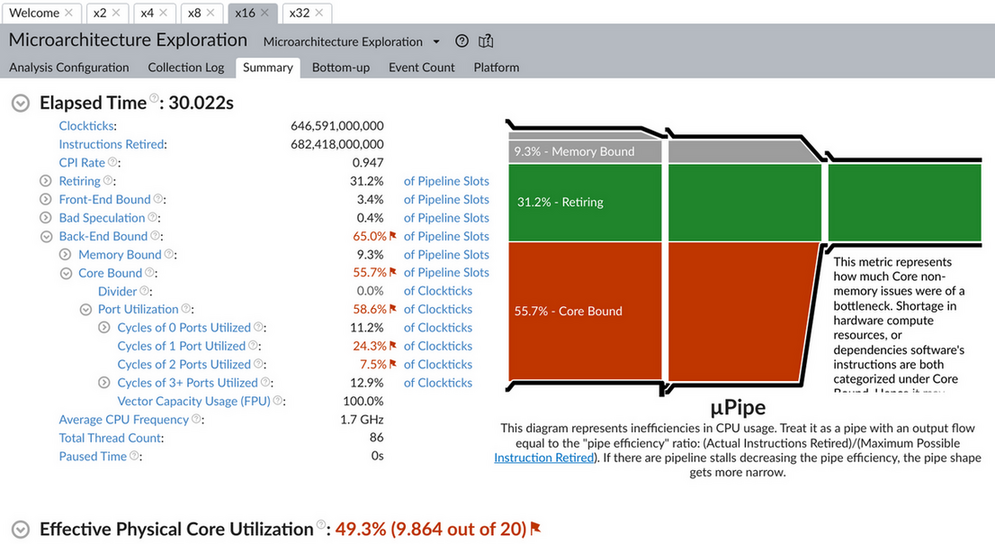
1.5.5.3.2. cache 的影响
通过前面提到的 cpu time 可以看到多线程性能并不仅仅和同步有关 (因为 cpu time 并不包含 wait 的时间)
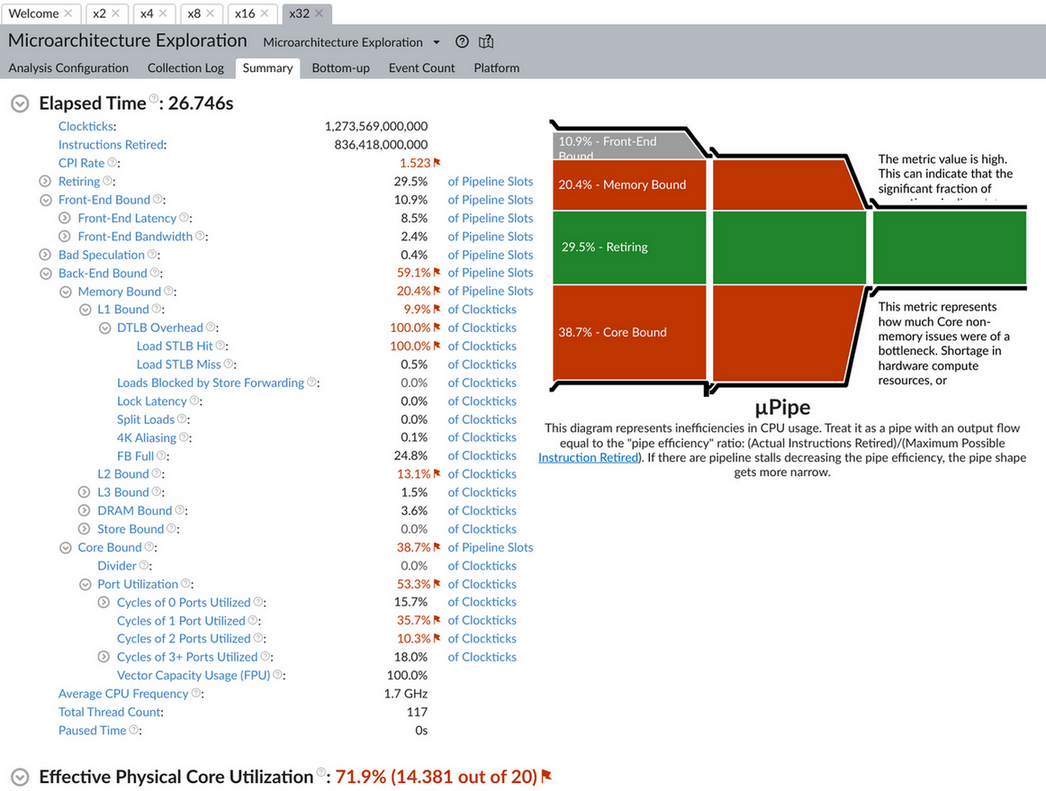
对比 2/4/8/16/32 个线程时 microarch 的数据, 可以看到随着线程增加, CPI (clock per instruction) 变大, cache miss 增加.
1.5.6. distributed training
https://www.oreilly.com/content/distributed-tensorflow/
https://theaisummer.com/distributed-training/
https://github.com/horovod/horovod
如果 intra_op_parallelism_threads 因为粒度太小无法更高效的并行, 那么分布式训练可以看做是粒度很大的并行: 它会把输入分成多份, 交给不同的机器或 GPU 处理, 然后再把梯度聚合. 虽然分布式训练针对的主要是集群, 但也许可以通过 multi worker 利用本机的多个进程来并行
在本机用 MultiWorkerMirroredStrategy 进行分布式训练 (https://github.com/sunwayforever/tf_cpu_benchmark/blob/master/distribute/mirror.sh), 性能比单机多线程提高 ~30%
distributed training 有不同的方式:
基于 data parallelism
data parallelism 是指每个进程有完整的模型, 但是把数据分为多份 (shard) 去并行的训练, 然后把梯度聚合后再分发出去. 这个 `梯度聚合再分发` 的算法称为 allreduce.
data parallelism 又可以分成两类:
同步
例如 tensorflow 中 MultiWorkerMirroredStrategy. 所有的进程运行一个 batch 后用某种 allreduce 算法来聚合梯度, 然后再继续下一个 batch. 所有进程需要同步其梯度, 若整个 cluster 中某个节点处理较慢, 则整个 cluster 都需要等待它.
异步
tensorflow 中的 ParameterServerStrategy 是异步的, 除了 worker 节点, 还有专门的 parameter server (ps) 节点, worker 异步的从 ps 取梯度, 计算完成后异步的把梯度上传给 ps
基于 model parallelism
当模型很大无法在单机上训练时, 可以使用基于 model parallelism 的方式来并行训练.
1.5.6.1. allreduce
一个简单的 allreduce 场景:
在`同步数据并行`的训练中, 10 个节点计算出梯度后, 每个节点都需要得到其它 9 个节点的梯度, 和自己的梯度平均一下做为真正的梯度, 简单的实现时有两个做法:
- 每个节点都向所有节点广播
- 存在一个中心服务器
第一种方式通信量很大, 每二种方式有单点失败的问题. 还有一种优化的方式称为 ring allreduce
https://tech.preferred.jp/en/blog/technologies-behind-distributed-deep-learning-allreduce/
另外, nvidia 的 nccl 和 intel 的 oneccl (collective commnications library) 都提供了优化的 allreduce 实现. tensorflow 的分布式训练可以使用 nccl, pytorch 则支持 oneccl.
在测试 MultiWorkerMirroredStrategy 时, 使用一个 worker 时耗时 7s, 使用四个 worker 耗时变为 10s, 多出来的部分应该主要是 allreduce 的开销
1.5.7. 其它
1.5.7.1. XLA 并行编译
虽然 xla 有可能通过并行加速编译 (https://groups.google.com/g/xla-dev/c/VZMMD44BC7Y), 但由于 xla 只需要编译一次, 所以对整个训练过程影响不大.
1.5.7.2. 多个 cuda stream
tensorflow 只会使用一个 (a single) cuda stream: https://github.com/tensorflow/tensorflow/issues/36634
1.5.8. 后续工作
- dataset num_parallel_calls 的 AUTOTUNE 机制
intra/inter op palrallelism 还有什么地方是性能瓶颈
VTune, cachegrind
- 基于多进程的分布式训练是否可能, 是否有意义
- XLA (and thread pool) benchmark
eigen
利用 RISC-V 的 vector 或 SIMD 指令加速 eigen 的 CPU device, 现在 `Eigen/src/Core/arch` 下已经包含 NEON, SSE, AVX, AVX512 等.
llvm
XLA 使用 llvm 生成 cpu 指令时需要 RISC-V 后端生成优化指令
Footnotes:
IR (Intermediate Representation), 代码的中间表示, 有利于模块解耦合, 代码重用, 并且使代码优化更容易. You can solve every problem with another level of indirection, except for the problem of too many levels of indirection.
